晶闸管-电动机
机械特性 机械系特性方程
等效电路分析
瞬时电压平衡方程
晶闸管-电动机
机械特性 机械系特性方程
等效电路分析
瞬时电压平衡方程
反馈控制
基本规律
1有静查
2抵抗扰动,服从给定
3系统精度依赖于给定和反馈检测的精度
调速系统
扰动源
扰动作用与影响
闭环调速系统
稳态性
分析条件 忽略各种非线性因素 忽略控制电源和电位器的电阻
电压比较
放大器
静特性方程
开环调速系统
存在问题
闭环调速系统
反馈控制
转速负反馈
UPE
转速控制要求
调速
稳速
加减速
调速指标
稳态性能指标
调速范围
静差率 定义:负载理想空载转速与额定转速之比
区别
关系
直流调速系统
调速电源 直流电源
旋转交流机组 静止式可控整流器 直流斩波器或脉宽调制变换器
旋转交流机组
原理
特性 可逆运行容易 正反转都能实现回馈制动 设备多、体积大、效率低
晶闸管可控整流器
原理
性能 经济性 可靠性
直流斩波器或脉宽调制变换器
原理
性能
控制方式
依据 :电压平均值
直流拖动控制系统
直流电机 特点
直流拖动控制系统
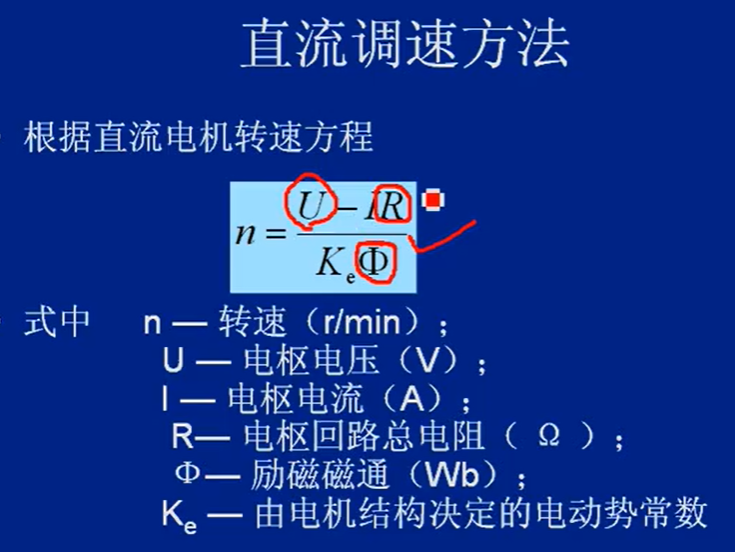
直流调速方法 直流电机转速方程
方法 调节电枢供电电压 减弱励磁磁通 改变电枢回路电阻
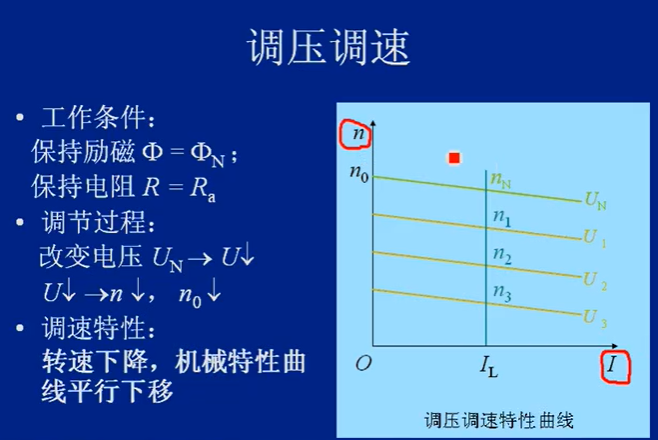
调压调速
1条件 保持励磁磁通 保持电阻
过程 改变电枢电压
调速特性 转速下降,机械特性曲线平行下移
性能 无极平滑调速
调阻调速
2 条件 保持励磁 保持电压
过程 增加电阻
特性 转速下降,机械特性曲线变软
性能 有级调速
调磁调速
3条件 保持电压 保持电阻
过程 减小励磁
特性 转速上升,机械特性曲线变软
性能 平滑调速,调速范围不大
直流调速电源
电力拖动
1,电力拖动的定义
电力拖动系统
2电力拖动发展概况
分类 调速与不调速 直流与交流
1960-1980 电力电子技术 晶闸管及其相控变流技术 整流器时代
1980后 大功率晶体管 可关断晶闸管 逆变时代
1990后 复合电力电子器件 及变频技术 变频器时代
直流电动机 特点 调速性能 转矩控制性能
早期 有接点控制
1957 晶闸管相控装置
今天 微机控制的全数字直流调速系统
交流调速系统取代直流调速系统
交流电动机 鼠笼式异步电动机
1930后 开关设备
今天 变频技术 脉宽调制 正玄波脉宽调制 数字化技术
典型2型系统
典型的2型系统也是以—20dB/dec的斜率穿越零分贝线。
稳态关系
静特性方程
闭环调速系统的稳态分析
电力拖动发展概况:
电力拖动可分为不调速和调速两大类
电动机类型可分为直流与交流拖动两大类
直流电动机具有良好的调速性能和转矩控制性能早期直流拖动采用有接点控制。
脉宽调制、正弦波脉宽调制
晶闸管触发和整流装置 Ud=ks*
转速负反馈的闭环反馈系统
可控直流电源:
PWM 脉宽调制
PFM
占空比 混合以上两种。
直流调试系统:良好的起、制动性能。
理论及实践成熟。
励磁磁通,Ke 电动势常数。
直流调试以变压调速为主
调压:机械特性曲线平行下移。
电枢回路电阻越大:机械特性变软。(转速变小)
调磁通:越小,转速越大 小范围调速 弱磁调速配合电枢电压调速。
旋转变流
大多数现代的电力拖动自动控制系统均可由低价系统近似
主要;直流调速方法 电源 控制